


Серия ET
Дискретный ввод/вывод
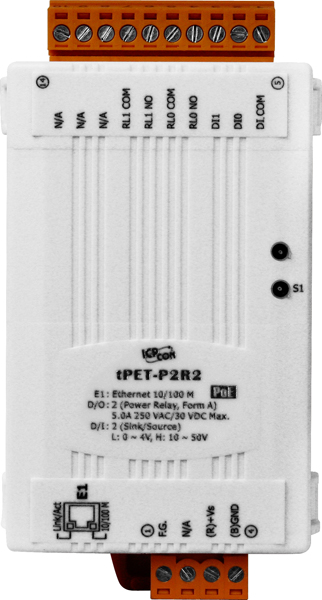
Модули ввода-вывода серии ET, оснащенные каналами дискретного ввода/вывода. Модули дискретного ввода/вывода используются для считывания сигналов от внешних устройств и преобразования их в цифровой формат, понятный для контроллера, а также для отправки управляющих сигналов на внешние устройства.

Аналоговый ввод
Модули аналогового ввода серии ET используются для преобразования аналоговых сигналов в цифровые данные, которые затем обрабатываются контроллером. Они могут иметь различные диапазоны входных напряжений или токов, в зависимости от типа датчика или устройства, с которым они работают.

Аналоговый вывод
Модули аналогового вывода серии ET используются для генерации аналоговых сигналов на основе команд контроллера. Они могут использоваться для управления различными устройствами, такими как приводы, клапаны, сервоприводы и другие, которые требуют аналоговых управляющих сигналов.

Смешанный ввод/вывод
Модули смешанного ввода-вывода серии ET способны принимать аналоговые и дискретные сигналы, преобразовывать их и генерировать выходные сигналы для управления исполнительными механизмами и передачи данных., что делает их универсальными и полезными для широкого спектра приложений.

Модули управления движением
Модули управления движением серии ET предназначены для управления сервоприводами или шаговыми двигателями, а также для обработки сигналов энкодера. Они интегрируются в систему управления и обеспечивают преобразование управляющих сигналов контроллера в физические воздействия на исполнительный механизм.